
【项目记录贴】基于STM32的智能盲人导引设备
前言
这是一个项目大纲存放贴,目的是理清学校“科研训练”中的“盲人导引”项目的技术细节和开发迭代进度,也是一个完整的嵌入式开发小项目的实现案例,包括从确定功能,选择器件,编写代码到实际的设计电路、制作PCB和最小可行实例(MVP),希望可供大家参考。
项目概述
功能要求
对于针对盲人的导引设备,应该适合用户视力障碍的特性,需要使用传感器、语音提示、路径规划和物联网等技术实现警示、导引避障、报警等辅助功能,具体的功能要求如下:
- 警示灯:自动检测光强,当环境光线较低或者用户主动双击按键时,点亮警示灯并且闪烁,提醒人行道上的路人注意避让。
- 语音指引:通过HC-SR04 距离传感器测量距离,当距离小于一定大小时,通过串口TTS模块发出提示。在实现此功能的情况下,考虑增设两个左右各75度方向的超声波或TOF激光测距传感器,实现在检测到障碍的情况下判断路况并指导盲人转向,直到前方障碍物消失。
- 定位和报警:通过GPS模块来确定经纬度,GSM模块负责发送信息。用户需要预先设定紧急联系人列表,当用户长按按键,或者MPU6050加速度传感器检测到过大的加速度且在一段时间之内未按键取消时,发出报警提示音并发送附带位置信息的报警短信(可以直接通过地图软件打开这个位置)。
- 其他:包含电源管理,多语言,以及触感导引(通过舵机和震动电机来实现提示和转向引导,适合听力存在障碍的用户)
需要准备的元器件
主控
STM32F103C8T6 最小系统板:STM32单片机具有低功耗,高性能,资源丰富等特点。由于该设备的语音、GSM、GPS三个模块均需要使用UART通信,且其他传感器也需要实时性较高的I2C、SPI通信,使用硬件外设接口丰富的STM32是最佳选择。
传感器
C78960 数字环境光传感器:这是一个自带光敏传感器、A-D转换电路和I2C Bus的数字光线传感器,可以通过I2C数字总线接口读取光照强度,以此判断是否需要点亮警示灯。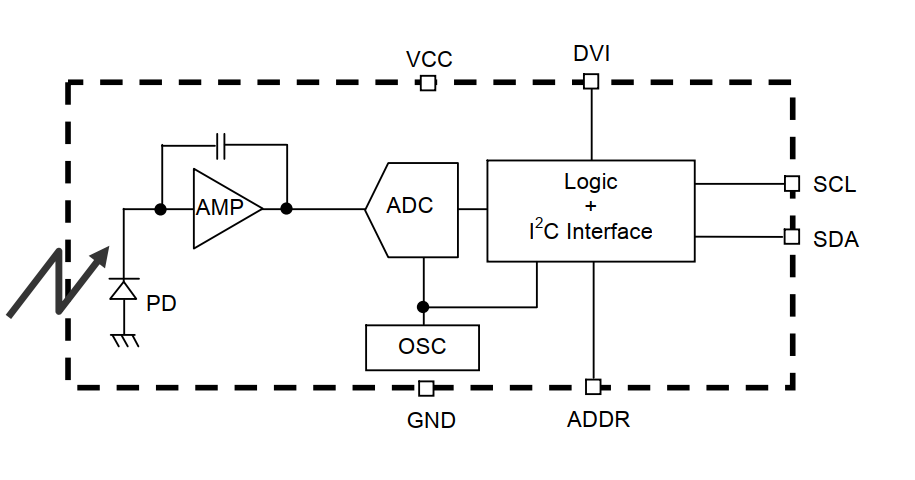
MPU6050 加速度传感器:这是一个比较常用的IMU设备,可以实时测量坐标系下三个方向的加速度(acc)和角速度(gyro)。通过加速度传感器,可以判断是否发生跌倒、碰撞等情况,并启动紧急报警。
HC-SR04 超声波测距传感器:可以通过声波发送和接收的时间差判断前方物体的距离,可以用于确定前方的障碍物。
实体按键:使用一个面积较大,突起明显、寿命长的机械按键作为唯一的用户输入设备,通过不同的按键方式来选择功能,降低用户的学习成本,方便使用。
ATK-1218 定位模块:可以通过GPS和北斗进行定位,并且通过串行接口发送经纬度,用于确定当前用户所处的位置。
执行器
蜂鸣器、LED:用于发出响声和警报光线。
GA-68 通信模块:可以连接2G移动网络并接收AT指令发送短信,实现短信求助和报警。
Serial TTS 文字转语音模块:可以将文字提示转换为语音输出,以提示盲人相关信息。
附件
锂离子电池:使用3000mAh 18650可拆卸锂离子电池,既可以保障长时间的续航,又方便用户随时更换。
电源管理模块:使用TP4056进行电池的放电管理和充电保护,使用现代的Type-C接口连接电源,兼容各种充电器。
功能实现逻辑
首先,用户按下按键,设备的各个外设初始化,STM32通过串口向TTS模块发送信息“开机”。
程序中,通过定时器中断,每1s向C78960发送读数据请求,通过I2C协议读取当前的光照强度,通过实际测量的数据,我们可以确定一个“能见度较低”的光照强度阈值,当测量的强度低于该阈值(或用户双击按钮)时,语音提示“指示灯开启”,红色LED将按照一定频率闪烁,直到光线恢复或用户再次双击按键(按照唤起闪烁的方式决定),关闭LED的闪烁。
拐杖的中下部约30厘米处安装一个通过3D打印制作的传感器模组框架,固定正前方、左侧75度和右侧75度三个超声波传感器,模拟一般视野的可见范围。在正常行走时,程序每0.5秒通过TRIG接口发送测量请求,使用一个空置Timer测量接收到的ECHO信号长度,并通过算法转换为长度。当长度小于一定大小(2m)时,蜂鸣器会由慢到快地响铃,并且语音模块提示“发现障碍物”。
在此状态下,STM32会轮流扫描左、右、中三个传感器的数据,寻找左、右侧的可行性,当某侧的距离可判定为“无穷大”或“大于安全距离”时,会提示用户朝这个方向转弯,直到中间的传感器不再探测到障碍物。判断的逻辑如下:
| 左侧 | 中间 | 右侧 | 提示 |
|---|---|---|---|
| 大于阈值 | 小于阈值 | 大于阈值 | 默认右转弯 |
| 小于阈值 | 小于阈值 | 大于阈值 | 右转弯 |
| 大于阈值 | 小于阈值 | 小于阈值 | 小心向左转 |
| 小于阈值 | 小于阈值 | 小于阈值 | 此路不通,请手动探测 |
| 任意 | 大于阈值 | 任意 | 请直行 |
主控每0.3s会通过硬件SPI接口检测MPU6050传感器的加速度信息,一般而言,加速度在不受外力的情况下,矢量合力向下,大小为重力加速度。通过三维坐标系的勾股定理,可以计算出合加速度的大小。系统维护一个长度较小的滤波窗口,并对每次接收的加速度大小进行差分,一旦加速度的变化率过大,系统就会触发“预报警模式”。
考虑到触发此模式时,可能是因为不慎掉落,也可能是用户已经因受伤或视力问题无法行动,语音模块会先发出“您安全吗?如果安全请在10秒内按下按键”的提示音,如果用户没有按下按键,计时结束后,会触发短信报警模式。(在一般状态下,长按5秒以上也可以直接触发报警模式)
报警时,系统通过GPS模块进行定位,将信息进行打包,使其成为可以被直接从地图打开的形式(URL Scheme):
1 | 我遇到了紧急状况,需要你的帮助!下面的地址是我现在的位置: |
系统内预先设定联系人列表,通过串口指令可进行增删改查。
在位置确定后,STM32通过AT指令与GSM模块通信,逐个发送求助短信。并且不断发出蜂鸣声和最大音量的“我需要帮助”提示音,直到再次按下按钮。
以上是系统的初版程序逻辑。
项目设计
外壳
设想采用钢管/塑料管搭配反光条作为拐杖主体,传感器固定在拐杖中部,主机、电池等集成在一块主板上,固定在拐杖上方。把持部分使用类似于“自行车龙头”的设计,以保证传感器方向始终向前,且该结构还可以方便的进行升级改造,加入震动导引等含有方向+触感的功能。
按钮安装在龙头前部,设计为阻尼较大的机械按键,以防止误触,指示灯安装在主机前端和后端,并加匀光罩,可以使周围行人和车辆发现。
3D结构图待设计
电路
待补充
程序代码
待补充
PCB
待补充
总结
待补充
 微信赞赏码
微信赞赏码